SMART EGG INCUBATOR
Sistem Kontrol dan Monitoring Mesin
Tetas Telur Ayam Close House

Latar Belakang
Proses pengeraman telur oleh induk ayam secara alami memang telah berlangsung sejak lama, namun metode ini memiliki berbagai keterbatasan yang menyebabkan efisiensi penetasan telur menjadi rendah. Salah satu permasalahan utama adalah ketergantungan terhadap kondisi lingkungan yang tidak selalu stabil. Suhu dan kelembaban yang dibutuhkan untuk mendukung perkembangan embrio telur sering kali tidak dapat dijaga secara konstan oleh induk ayam, terutama ketika terjadi perubahan cuaca ekstrem atau gangguan dari lingkungan sekitar.
Selain itu, induk ayam hanya mampu mengerami dalam jumlah terbatas, dan sangat rentan terhadap stres yang dapat mengganggu proses pengeraman. Ketika induk terganggu oleh suara bising, predator, atau aktivitas manusia, ia cenderung meninggalkan sarangnya dan menghentikan pengeraman, yang pada akhirnya berdampak pada kegagalan penetasan. Pengeraman alami juga tidak memungkinkan proses pemantauan secara menyeluruh terhadap kondisi telur, seperti suhu optimal, kelembaban udara, atau potensi kegagalan akibat kerusakan fisik pada telur.
Berdasarkan permasalahan tersebut, diperlukan suatu inovasi teknologi untuk menciptakan sistem penetasan telur yang efisien, stabil, dan dapat di monitor secara real-time. Oleh karena itu, penulis mencetuskan ide alat "Smart Egg Incubator", sebuah mesin tetas telur berbasis close house yang dirancang dengan sistem kontrol otomatis dan pemantauan cerdas menggunakan berbagai sensor serta mikrokontroler.

Alat ini akan menggunakan dua buah Raspberry Pi Pico yang saling berkomunikasi untuk membagi tugas pengolahan dan kontrol, sehingga proses dapat berjalan secara paralel dan efisien. Sensor DHT22 digunakan untuk mengukur dan menjaga kestabilan suhu serta kelembaban dalam inkubator. Gas sensor MQ-2 berperan penting dalam mendeteksi keberadaan gas berbahaya seperti asap atau amonia, yang dapat membahayakan embrio. Sementara itu, sensor LDR (photoresistor) digunakan untuk memantau intensitas cahaya di dalam inkubator, yang akan dikendalikan oleh LED sebagai pengatur pencahayaan agar menyerupai kondisi alami.
Untuk mendeteksi perubahan massa telur, terutama saat proses penetasan atau potensi kerusakan, digunakan sensor load cell HX711, yang akan memberikan sinyal ke sistem apabila terjadi perubahan signifikan pada berat telur. Semua data dari sensor akan ditampilkan secara real-time melalui LCD I2C, sehingga pengguna dapat memantau kondisi inkubator dengan mudah. Sebagai kontrol otomatis, sistem ini dilengkapi motor servo yang akan membuka atau menutup katup ventilasi udara, buzzer sebagai alarm peringatan bila terjadi anomali, serta LED untuk penyesuaian intensitas cahaya di dalam ruang inkubasi.
Dengan integrasi sistem ini, Smart Egg Incubator diharapkan dapat meningkatkan tingkat keberhasilan penetasan telur secara signifikan, mengurangi ketergantungan pada induk ayam, serta memberikan kemudahan dan efisiensi dalam pemantauan dan pengendalian lingkungan inkubasi secara otomatis dan presisi.
Rumusan Masalah
Rumusan masalah dalam proyek ini adalah sebagai berikut:
Bagaimana merancang dan membangun sistem inkubator telur otomatis berbasis Raspberry Pi Pico dengan pemantauan dan pengendalian kondisi lingkungan secara real-time?
Bagaimana mengintegrasikan berbagai sensor (DHT22, MQ-2, LDR) untuk mendeteksi dan menjaga kestabilan suhu, kelembapan, gas berbahaya, pencahayaan, dan berat telur?
Bagaimana memanfaatkan aktuator (motor servo, buzzer, LED) sebagai sistem kontrol otomatis terhadap ventilasi, alarm, dan pencahayaan di dalam inkubator?
Bagaimana merancang komunikasi antar dua Raspberry Pi Pico untuk membagi fungsi monitoring dan kontrol secara efisien?
Tujuan Project
Tujuan dari proyek Smart Egg Incubator ini adalah:
Merancang dan mengembangkan sistem inkubator telur ayam otomatis berbasis Raspberry Pi Pico dengan konsep close house.
Membangun sistem pemantauan lingkungan inkubator menggunakan sensor DHT22, MQ-2, dan LDR secara real-time.
Menerapkan sistem kontrol otomatis terhadap ventilasi, alarm, dan pencahayaan dengan menggunakan motor servo, buzzer, dan LED.
Mengimplementasikan komunikasi antar mikrokontroler (Raspberry Pi Pico) untuk membagi tugas antara sistem monitoring dan sistem kontrol secara efektif.
Menampilkan informasi kondisi inkubator secara langsung melalui OLED 1306 agar pengguna dapat melakukan pemantauan dengan mudah.
Manfaat Project
Adapun manfaat yang diharapkan dari pengembangan proyek ini meliputi:
Meningkatkan efisiensi dan keberhasilan penetasan telur dengan menciptakan lingkungan inkubasi yang stabil dan terkendali.
Mengurangi ketergantungan terhadap induk ayam dalam proses pengeraman, sehingga dapat meningkatkan kapasitas produksi.
Memberikan solusi otomatisasi yang cerdas dan terjangkau bagi peternak kecil hingga menengah dalam mengembangkan sistem penetasan mandiri.
Menjadi sarana pembelajaran teknologi embedded system dan Internet of Things (IoT) dalam dunia peternakan modern.
Tujuan dari proyek Smart Egg Incubator ini adalah:
Merancang dan mengembangkan sistem inkubator telur ayam otomatis berbasis Raspberry Pi Pico dengan konsep close house.
Membangun sistem pemantauan lingkungan inkubator menggunakan sensor DHT22, MQ-2 dan LDR, secara real-time.
Menerapkan sistem kontrol otomatis terhadap ventilasi, alarm, dan pencahayaan dengan menggunakan motor servo, buzzer, dan LED.
Mengimplementasikan komunikasi antar mikrokontroler (Raspberry Pi Pico) untuk membagi tugas antara sistem monitoring dan sistem kontrol secara efektif.
Menampilkan informasi kondisi inkubator secara langsung melalui OLED 1306 agar pengguna dapat melakukan pemantauan dengan mudah.
1. Mikrokontroler Raspberry Pi Pico
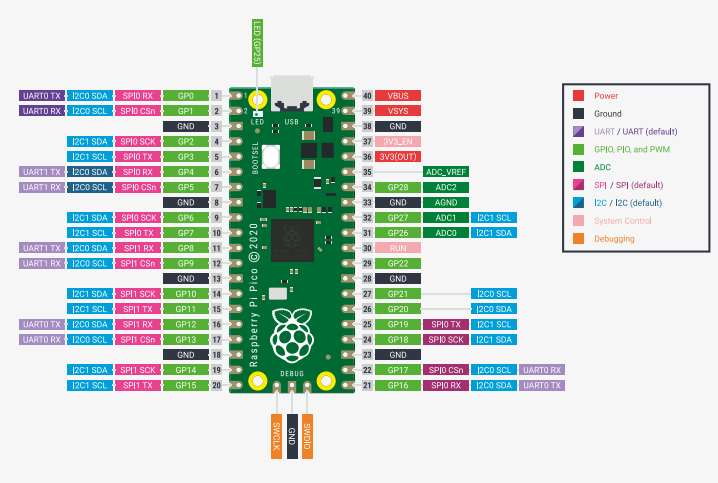
Chip mikrokontroler RP2040 yang dirancang oleh Raspberry Pi di Inggris Raya
Prosesor Arm Cortex M0+ dual-core, clock fleksibel hingga 133 MHz
264KB SRAM, dan 2MB memori flash on-board
USB 1.1 dengan dukungan perangkat dan host
Mode tidur dan dorman berdaya rendah
Pemrograman drag-and-drop menggunakan penyimpanan massal melalui USB
26 × pin GPIO multifungsi
2 × SPI, 2 × I2C, 2 × UART, 3 × ADC 12-bit, 16 × saluran PWM yang dapat dikontrol
Jam dan pengatur waktu yang akurat pada chip
Sensor suhu
Pustaka floating-point yang dipercepat pada chip
8 × Mesin status I/O yang dapat diprogram (PIO) untuk dukungan periferal khusus
Raspberry Pi Pico hadir sebagai modul berbenteng yang memungkinkan penyolderan langsung ke
papan pembawa
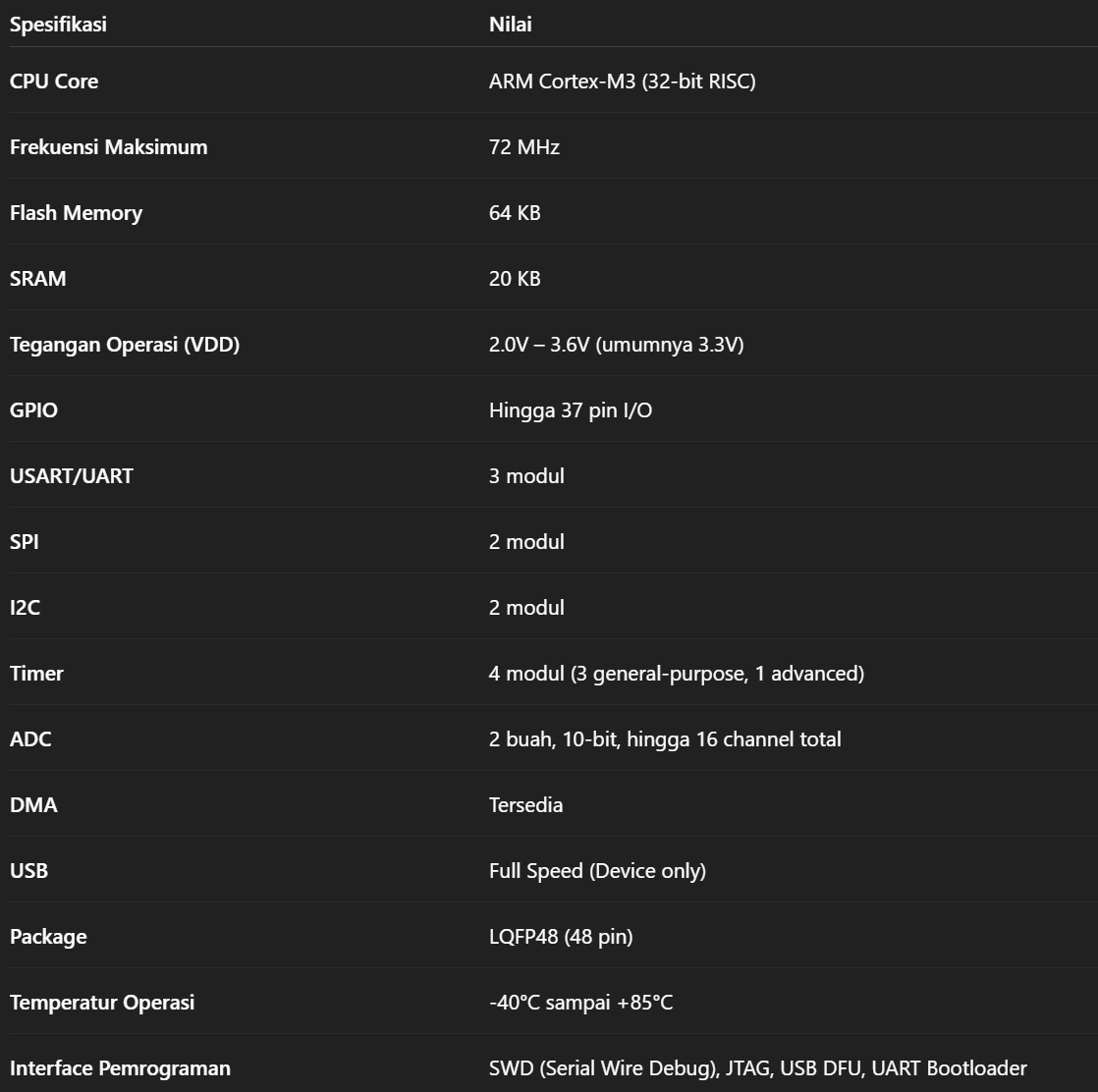
2. Mikrokontroller STM32F103C8T6
 Gambar 3. Mikrokontroler STM32F103C8T6
Gambar 3. Mikrokontroler STM32F103C8T6
STM32F103C8T6 adalah sebuah mikrokontroler 32-bit berbasis ARM
Cortex-M3 buatan STMicroelectronics, termasuk
dalam seri STM32F1 yang dikenal sebagai mainstream line. Mikrokontroler ini
banyak digunakan dalam sistem tertanam (embedded system), IoT, robotika, dan
pengontrol industri karena harganya yang murah, performa baik, serta ekosistem
pengembangan yang luas.
Prinsip kerjanya secara garis besar adalah:
a). Power-up dan Reset
Saat diberi tegangan (biasanya 3.3V), chip akan di-reset dan memulai
booting dari alamat awal Flash.
b). Eksekusi Program
Program yang sudah ditanam di Flash memory dijalankan oleh CPU ARM
Cortex-M3. Program bisa melakukan pembacaan sensor, logika kontrol, pengaturan
PWM, komunikasi serial, dan sebagainya.
c). Peripheral & Interrupt
STM32 dilengkapi dengan banyak peripheral (GPIO, ADC, UART, SPI, Timer,
dll). Perangkat ini juga mampu merespons kejadian eksternal melalui sistem
interrupt, yang dikelola oleh NVIC (Nested Vectored Interrupt Controller).
d). Komunikasi & Kontrol
Dapat berkomunikasi dengan perangkat lain (sensor, modul, motor, dll)
melalui GPIO, UART, SPI, I2C, dan mengatur keluaran berupa PWM, sinyal digital,
dll.
Pin Pin :
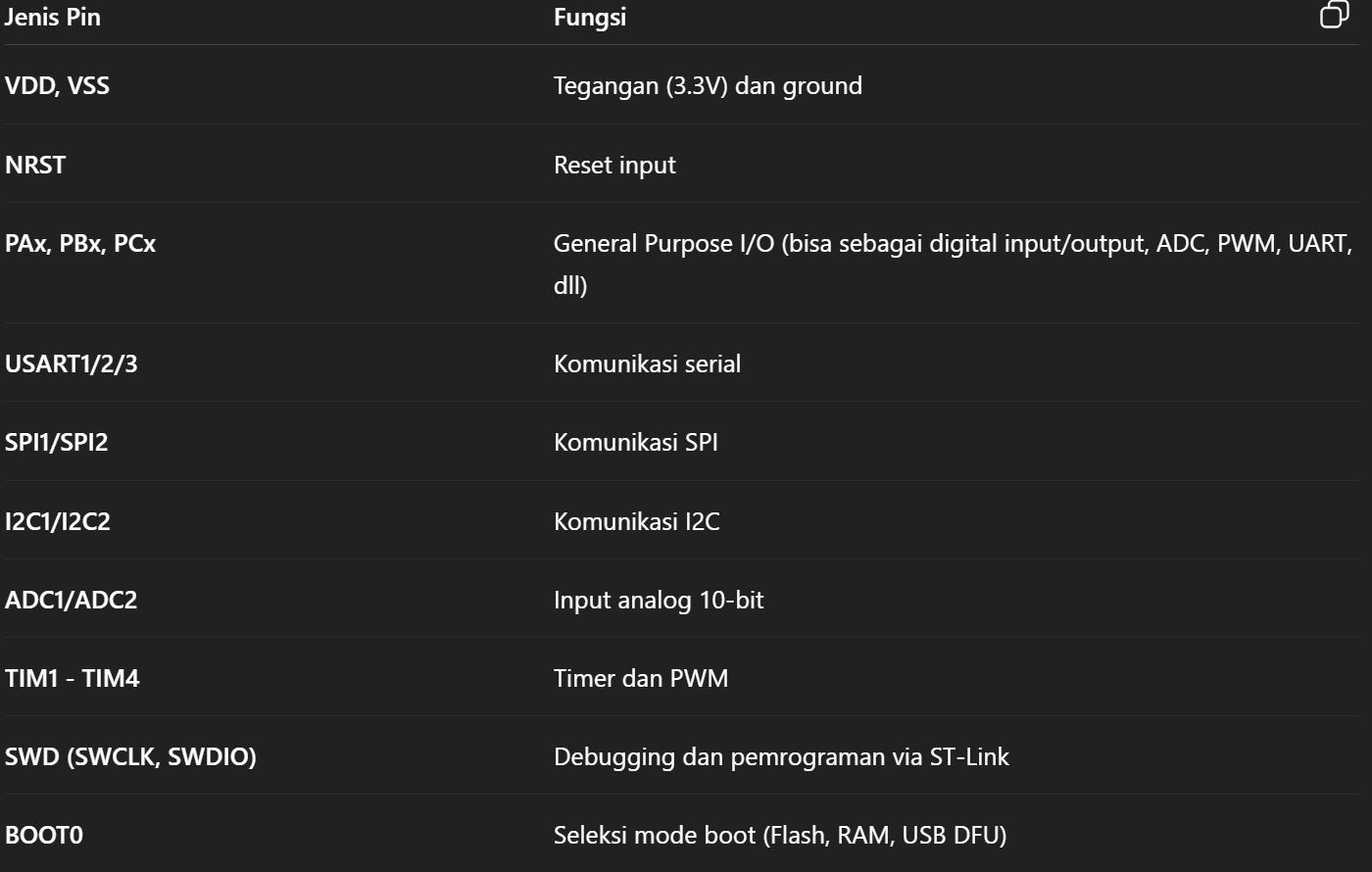
Spesifikasi :
3.Sensor DHT11
 Gambar 4. DHT 11
Gambar 4. DHT 11
Sensor DHT11 digunakan untuk mengukur suhu dan kelembapan dalam inkubator penetas telur ayam, yang penting untuk proses penetasan yang optimal. Sensor ini dapat digunakan bersama dengan mikrokontroler untuk memantau dan mengontrol suhu serta kelembapan, sehingga menciptakan lingkungan yang sesuai untuk perkembangan embrio. Sensor DHT memiliki tiga komponen utama, yaitu NTC thermistor untuk mengukur suhu, sensor kelembaban kapasitif untuk mengukur kelembaban relatif udara, dan IC pengolah sinyal yang mengonversi data analog menjadi sinyal digital yang dapat dibaca mikrokontroler. Prinsip kerjanya dimulai dari pengukuran kelembaban menggunakan sensor kapasitif yang terdiri dari dua pelat dan bahan dielektrik sensitif terhadap kelembaban; perubahan kelembaban menyebabkan perubahan kapasitansi yang kemudian dikonversi oleh IC menjadi data digital. Sementara itu, pengukuran suhu dilakukan dengan thermistor, sebuah resistor yang resistansinya menurun seiring peningkatan suhu; perubahan resistansi ini juga diolah IC menjadi nilai suhu digital.
4.Sensor Gas MQ-2
Gambar 5. Pin MQ-2 Gas Sensor
Sensor MQ2 berfungsi sebagai sensor pendukung untuk mendeteksi gas H2S yang dihasilkan oleh telur.
Sensor gas MQ-2 terdiri dari elemen pemanas, sensor gas berbahan SnO₂
(timah dioksida), dan rangkaian penguat sinyal. Sensor ini bekerja berdasarkan
perubahan resistansi konduktor semikonduktor saat terkena gas seperti LPG,
propana, hidrogen, asap, dan metana. Saat gas mudah terbakar terdeteksi,
konsentrasi gas memengaruhi kadar oksigen di sekitar permukaan sensor, sehingga
resistansi SnO₂ berubah. Perubahan resistansi ini diubah menjadi sinyal listrik
oleh rangkaian pembanding atau penguat, lalu dikirim sebagai sinyal analog (dan
bisa diubah menjadi digital) ke mikrokontroler. Sensor MQ-2 membutuhkan waktu
pemanasan awal (preheat) selama beberapa detik hingga menit agar elemen pemanas
bekerja optimal dan sensor siap memberikan pembacaan yang akurat.
data sheet
Operating Voltage is +5V
Can be used to Measure or detect LPG, Alcohol, Propane, Hydrogen, CO and even
methane
Analog output voltage: 0V to 5V
Digital Output Voltage: 0V or 5V (TTL Logic)
Preheat duration 20 seconds
Can be used as a Digital or analog sensor
The Sensitivity of Digital pin can be varied using the potentiometer
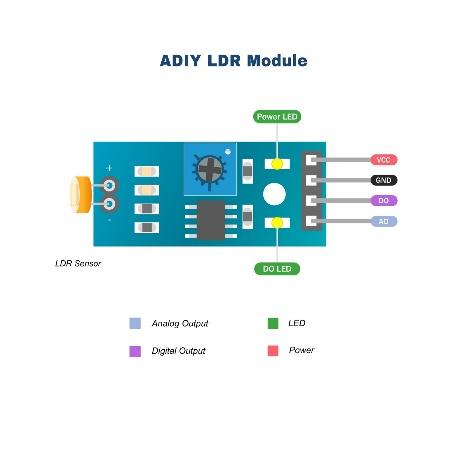
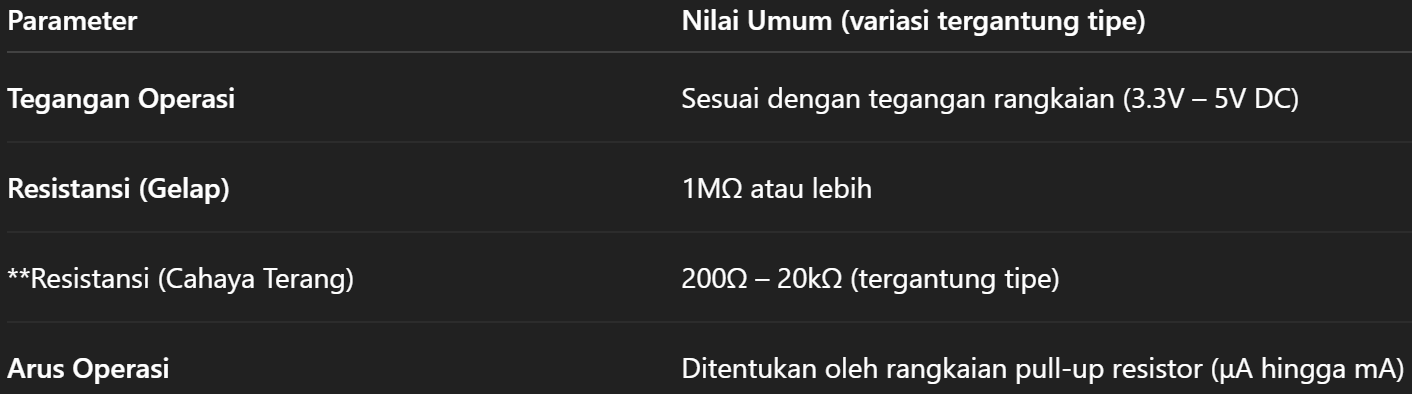
5.Sensor LDR
Gambar 6. LDR Sensor
Sensor LDR (Light Dependent
Resistor) atau fotokonduktor adalah komponen elektronik yang resistansinya
berubah tergantung pada intensitas cahaya yang mengenainya. LDR terbuat dari
bahan semikonduktor seperti cadmium sulfide (CdS) yang bersifat sensitif terhadap
cahaya. Saat cahaya terang menyinari permukaan LDR, energi foton menyebabkan
lebih banyak elektron bebas, sehingga resistansi menurun. Sebaliknya, dalam
kondisi gelap atau cahaya rendah, jumlah elektron bebas menurun sehingga
resistansi meningkat. Mikrokontroler dapat membaca perubahan resistansi ini
melalui pembagi tegangan, dan mengubahnya menjadi nilai intensitas cahaya.
Prinsip kerja ini banyak digunakan dalam sistem otomatisasi seperti lampu jalan
otomatis, sensor cahaya ruangan, atau perangkat hemat energi. Secara internal, LDR tersusun
dari bahan semikonduktor fotokonduktif (biasanya cadmium sulfide CdS)
yang resistansinya berubah tergantung jumlah foton (cahaya) yang diterima
data sheet:
Can be used to sense Light
Easy to use on Breadboard or Perf Board
Easy to use with Microcontrollers or even with normal Digital/Analog IC
Small, cheap and easily available
Available in PG5 ,PG5-MP, PG12, PG12-MP, PG20 and PG20-MP series
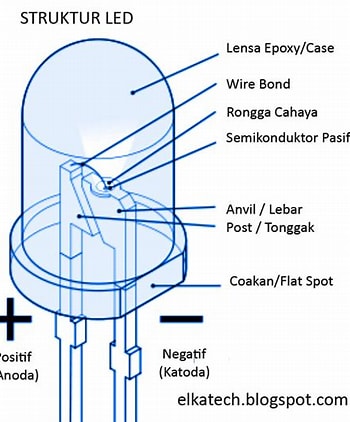
6. LED
Gambar 7. LED
LED (Light Emitting Diode) adalah dioda semikonduktor yang bisa memancarkan cahaya ketika dialiri
arus listrik maju (forward bias).Ketika arus listrik mengalir dari anoda ke katoda, elektron dari pita konduksi
bertemu dengan hole (lubang elektron) → menghasilkan energi dalam bentuk cahaya (foton).
Ciri utama:Membutuhkan arus maju (DC).
Polaritas penting → salah pasang → tidak menyala.
LED terdiri dari dua lapisan
bahan semikonduktor, yaitu tipe-P dan tipe-N, yang membentuk sambungan PN.
Ketika arus listrik mengalir dari anoda (positif) ke katoda (negatif), elektron
dari lapisan N dan hole dari lapisan P bertemu di daerah sambungan. Proses
rekombinasi ini menyebabkan elektron melepaskan energi dalam bentuk foton, yang
tampak sebagai cahaya. Warna cahaya yang dihasilkan tergantung pada jenis bahan
semikonduktor dan energi celah pita (bandgap) yang digunakan. LED memiliki
efisiensi tinggi, umur panjang, dan digunakan secara luas pada indikator,
pencahayaan, dan tampilan digital. LED harus dilengkapi resistor pembatas arus
agar tidak rusak akibat arus berlebih.
Pin LED
Variasi Tegangan LED berdasarkan Warna LED

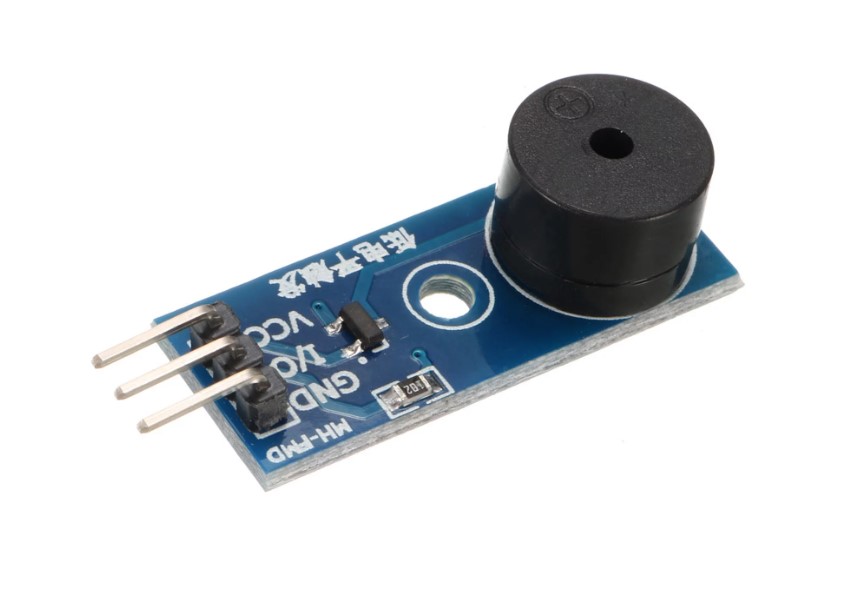
7.Buzzer
Gambar 8. Buzzer
Buzzer adalah komponen elektromekanis atau elektronik yang menghasilkan suara ketika dialiri arus listrik.
Terdapat 2 jenis buzzer:
Active Buzzer lebih mudah dipakai untuk bunyi sederhana.
Passive Buzzer cocok untuk suara dengan nada/melodi.
Pin
Data sheet
Chip mikrokontroler RP2040 yang dirancang oleh Raspberry Pi di Inggris Raya
Prosesor Arm Cortex M0+ dual-core, clock fleksibel hingga 133 MHz
264KB SRAM, dan 2MB memori flash on-board
USB 1.1 dengan dukungan perangkat dan host
Mode tidur dan dorman berdaya rendah
Pemrograman drag-and-drop menggunakan penyimpanan massal melalui USB
26 × pin GPIO multifungsi
2 × SPI, 2 × I2C, 2 × UART, 3 × ADC 12-bit, 16 × saluran PWM yang dapat dikontrol
Jam dan pengatur waktu yang akurat pada chip
Sensor suhu
Pustaka floating-point yang dipercepat pada chip
8 × Mesin status I/O yang dapat diprogram (PIO) untuk dukungan periferal khusus
STM32F103C8T6 adalah sebuah mikrokontroler 32-bit berbasis ARM
Cortex-M3 buatan STMicroelectronics, termasuk
dalam seri STM32F1 yang dikenal sebagai mainstream line. Mikrokontroler ini
banyak digunakan dalam sistem tertanam (embedded system), IoT, robotika, dan
pengontrol industri karena harganya yang murah, performa baik, serta ekosistem
pengembangan yang luas.
Prinsip kerjanya secara garis besar adalah:
a). Power-up dan Reset
Saat diberi tegangan (biasanya 3.3V), chip akan di-reset dan memulai booting dari alamat awal Flash.
b). Eksekusi Program
Program yang sudah ditanam di Flash memory dijalankan oleh CPU ARM Cortex-M3. Program bisa melakukan pembacaan sensor, logika kontrol, pengaturan PWM, komunikasi serial, dan sebagainya.
c). Peripheral & Interrupt
STM32 dilengkapi dengan banyak peripheral (GPIO, ADC, UART, SPI, Timer, dll). Perangkat ini juga mampu merespons kejadian eksternal melalui sistem interrupt, yang dikelola oleh NVIC (Nested Vectored Interrupt Controller).
d). Komunikasi & Kontrol
Dapat berkomunikasi dengan perangkat lain (sensor, modul, motor, dll)
melalui GPIO, UART, SPI, I2C, dan mengatur keluaran berupa PWM, sinyal digital,
dll.
 Gambar 5. Pin MQ-2 Gas Sensor
Gambar 5. Pin MQ-2 Gas SensorOperating Voltage is +5V
Can be used to Measure or detect LPG, Alcohol, Propane, Hydrogen, CO and even methane
Analog output voltage: 0V to 5V
Digital Output Voltage: 0V or 5V (TTL Logic)
Preheat duration 20 seconds
Can be used as a Digital or analog sensor
The Sensitivity of Digital pin can be varied using the potentiometer

Can be used to sense Light
Easy to use on Breadboard or Perf Board
Easy to use with Microcontrollers or even with normal Digital/Analog IC
Small, cheap and easily available
Available in PG5 ,PG5-MP, PG12, PG12-MP, PG20 and PG20-MP series
Membutuhkan arus maju (DC).
Polaritas penting → salah pasang → tidak menyala.
LED terdiri dari dua lapisan bahan semikonduktor, yaitu tipe-P dan tipe-N, yang membentuk sambungan PN. Ketika arus listrik mengalir dari anoda (positif) ke katoda (negatif), elektron dari lapisan N dan hole dari lapisan P bertemu di daerah sambungan. Proses rekombinasi ini menyebabkan elektron melepaskan energi dalam bentuk foton, yang tampak sebagai cahaya. Warna cahaya yang dihasilkan tergantung pada jenis bahan semikonduktor dan energi celah pita (bandgap) yang digunakan. LED memiliki efisiensi tinggi, umur panjang, dan digunakan secara luas pada indikator, pencahayaan, dan tampilan digital. LED harus dilengkapi resistor pembatas arus agar tidak rusak akibat arus berlebih.

Terdapat 2 jenis buzzer:
Passive Buzzer cocok untuk suara dengan nada/melodi.

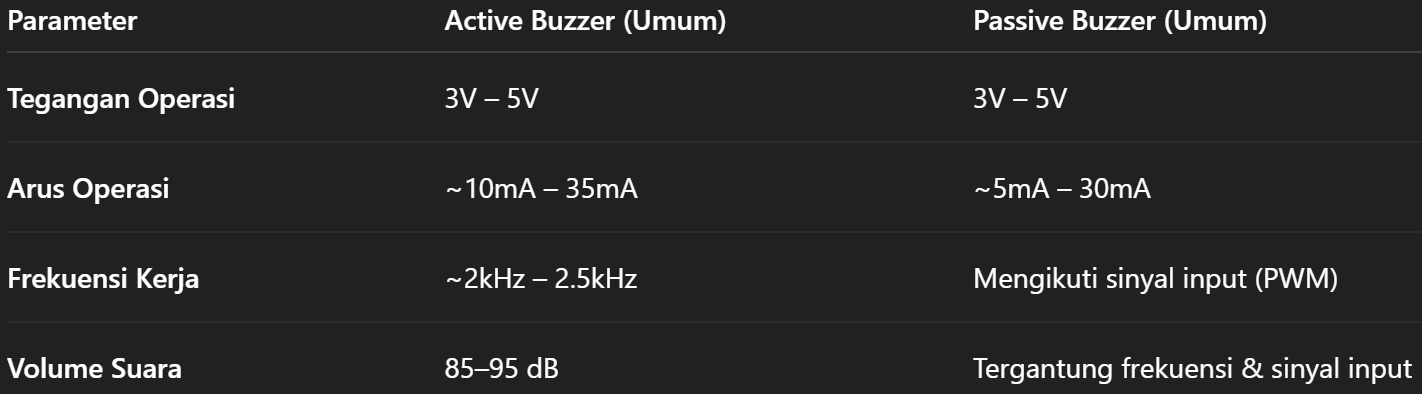
Buzzer aktif memiliki osilator internal sehingga dapat menghasilkan suara hanya dengan diberi tegangan DC; cukup disambungkan ke sumber daya, dan buzzer langsung berbunyi.
Buzzer pasif tidak memiliki osilator, sehingga memerlukan sinyal frekuensi dari mikrokontroler (biasanya PWM) untuk menghasilkan bunyi.
Buzzer aktif memiliki osilator internal sehingga dapat menghasilkan suara hanya dengan diberi tegangan DC; cukup disambungkan ke sumber daya, dan buzzer langsung berbunyi.
Buzzer pasif tidak memiliki osilator, sehingga memerlukan sinyal frekuensi dari mikrokontroler (biasanya PWM) untuk menghasilkan bunyi.
Prinsip kerjanya umumnya menggunakan efek piezoelektrik, di mana sebuah lempeng piezo akan bergetar saat dialiri arus bolak-balik, menghasilkan gelombang suara. Buzzer digunakan pada alarm, timer, penanda status, dan berbagai sistem peringatan dalam perangkat elektronik.
8. OLED SSD1306
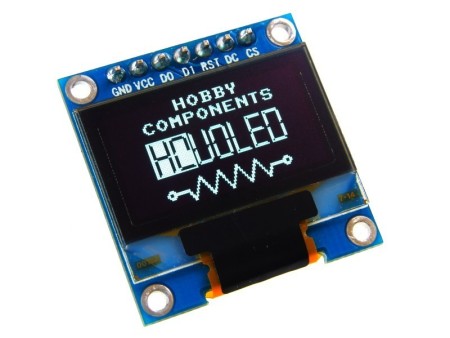
Gambar 9. OLED SSD1306
OLED SSD1306 adalah modul tampilan kecil yang menggunakan teknologi layar OLED (Organic Light Emitting Diode) dengan chip pengontrol bernama SSD1306. Modul ini sangat populer di dunia mikrokontroler karena konsumsi dayanya yang rendah, kontras yang tinggi, dan kemudahan integrasinya dengan berbagai platform seperti Arduino, STM32, dan Raspberry Pi. Layar ini umumnya memiliki resolusi 128x64 piksel dengan ukuran fisik sekitar 0.96 inci dan hanya menampilkan satu warna (monokrom), seperti putih, biru, atau hijau. Karena menggunakan teknologi OLED, setiap piksel mampu memancarkan cahaya sendiri tanpa memerlukan backlight, sehingga tampilannya tetap jelas meskipun dalam kondisi gelap. Chip SSD1306 berfungsi sebagai pengatur komunikasi antara mikrokontroler dan layar, dengan dukungan antarmuka I2C maupun SPI tergantung jenis modulnya. Modul ini dilengkapi dengan empat pin utama, yaitu VCC, GND, SCL, dan SDA (untuk komunikasi I2C), serta mendukung berbagai fitur seperti scroll otomatis dan pengaturan tingkat kecerahan. Berkat ukurannya yang ringkas dan efisiensi dayanya, OLED SSD1306 banyak digunakan dalam proyek-proyek sistem tertanam untuk menampilkan data sensor, jam digital, antarmuka pengguna mini, dan informasi sistem lainnya.

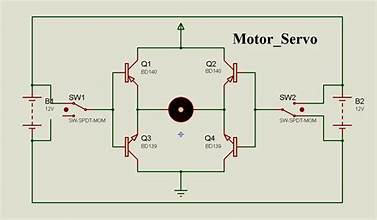
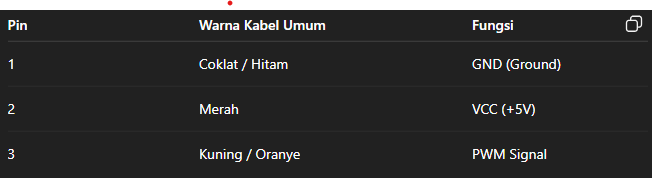
9. Motor Servo
Gambar 10. Servo Motor SG-90 TowePro
Motor servo adalah aktuator berputar yang digunakan untuk mengontrol posisi sudut dengan presisi tinggi. Di
dalamnya terdapat motor DC kecil, gearbox, dan rangkaian kontrol elektronik.



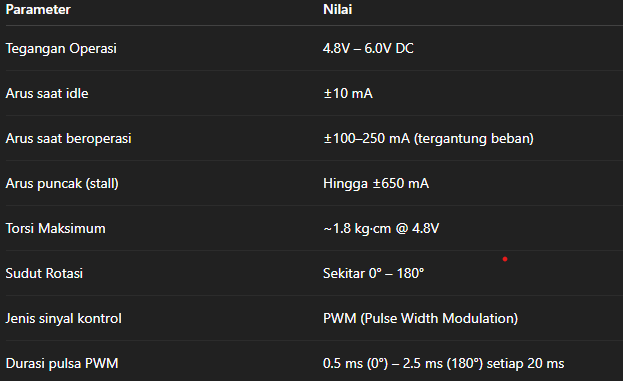
TowerPro SG-90 Features
Operating Voltage is +5V typically
Torque: 2.5kg/cm
Operating speed is 0.1s/60°
Gear Type: Plastic
Rotation : 0°-180°
Weight of motor : 9gm
Package includes gear horns and screw
Aktuator elektromekanis dapat
mengatur posisi sudut secara presisi sesuai sinyal kendali. Komponen utamanya
terdiri dari motor DC kecil, gearbox (untuk memperbesar torsi dan menurunkan
kecepatan), potensiometer (untuk mendeteksi posisi poros), dan rangkaian
kontrol elektronik. Prinsip kerjanya didasarkan pada sistem umpan balik
tertutup. Mikrokontroler mengirimkan sinyal PWM (Pulse Width Modulation) ke
servo—biasanya dengan lebar pulsa antara 1–2 ms dalam siklus 20 ms—yang
menentukan sudut putaran (misalnya 1 ms untuk 0°, 1.5 ms untuk 90°, dan 2 ms
untuk 180°). Rangkaian kontrol di dalam servo membandingkan posisi aktual (dari
potensiometer) dengan posisi yang diinginkan (berdasarkan sinyal PWM), lalu
menggerakkan motor hingga posisi tersebut tercapai. Motor servo banyak
digunakan pada robotika, sistem kendali otomatis, lengan robot, dan model
pesawat karena kemampuannya mengatur sudut dengan cepat dan presisi.
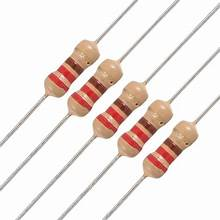
10. Resistor
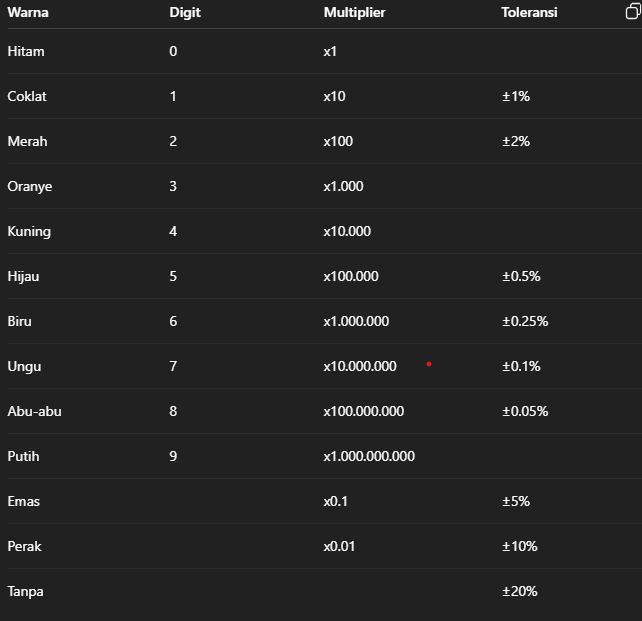
Gambar 11. ResistorResistor adalah komponen
elektronika pasif yang berfungsi menghambat arus listrik dalam suatu
rangkaian. Nilainya dinyatakan dalam Ohm (Ω), dan ditentukan oleh kode
warna atau ditulis langsung (pada jenis SMD).
Prinsip kerjanya sederhana:
resistor mengubah sebagian energi listrik menjadi panas saat arus mengalir
melaluinya, sehingga arus yang lewat dikendalikan sesuai nilai resistansinya.
Nilai resistansi ditentukan oleh bahan penyusunnya (biasanya karbon, logam,
atau film) dan bentuk fisiknya. Resistor memiliki banyak fungsi dalam
rangkaian, seperti Membatasi arus ke komponen sensitif seperti LED. Membentuk
pembagi tegangan untuk memberikan tegangan tertentu ke bagian rangkaian. Menyesuaikan
level sinyal, dan Menentukan waktu bersama kapasitor dalam rangkaian
RC (resistor-kapasitor). Nilai resistor biasanya ditandai dengan kode
warna atau angka di permukaannya, dan tersedia dalam berbagai ukuran daya
(seperti 1/4 watt, 1/2 watt, dll) tergantung besar arus yang bisa ditangani.
Operating Voltage is +5V typically
Torque: 2.5kg/cm
Operating speed is 0.1s/60°
Gear Type: Plastic
Rotation : 0°-180°
Weight of motor : 9gm
Package includes gear horns and screw
Secara Seri: Nilai total = R1 + R2 + R3 ...
Secara Paralel: Nilai total = 1 / (1/R1 + 1/R2 + ..
11. Push Button
Gambar 12. Push Button
Push button (tombol tekan) adalah sakelar (switch) mekanis yang menghubungkan atau memutuskan arus listrik saat ditekan. Umumnya digunakan dalam proyek mikrokontroler (Arduino, Raspberry Pi, dsb) sebagai input digital.

Secara Seri: Nilai total = R1 + R2 + R3 ...
Secara Paralel: Nilai total = 1 / (1/R1 + 1/R2 + ..



Prinsip Kerja:
Push button memiliki dua atau lebih kaki logam yang terhubung secara mekanis melalui kontak di dalam tombol. Saat ditekan, kontak akan menutup sirkuit, memungkinkan arus mengalir; saat dilepas, kontak terbuka dan arus terputus. Push button biasanya digunakan dalam mode normally open (NO), artinya sirkuit hanya aktif ketika tombol ditekan.
Fungsi dalam Rangkaian:
- Input sinyal digital untuk mikrokontroler (misalnya Arduino).
- Kontrol manual untuk menyalakan/mematikan rangkaian.
- Trigger/reset pada perangkat elektronik.
Agar push button bekerja stabil dan tidak menghasilkan sinyal bergetar (bouncing), biasanya digunakan resistor pull-up atau pull-down dalam rangkaian, sehingga mikrokontroler dapat membaca logika HIGH atau LOW secara konsisten saat tombol ditekan atau dilepas.
12.Adaptor
 Gambar 13. AdaptorAdaptor adalah alat yang mengkonversi tegangan/arus ac menjadi dc sebagai Sumber tegangan.
Gambar 13. AdaptorAdaptor adalah alat yang mengkonversi tegangan/arus ac menjadi dc sebagai Sumber tegangan..
Komponen dan Prinsip Kerja:
Adaptor terdiri dari beberapa bagian utama:
- Transformator: Menurunkan tegangan AC tinggi dari stopkontak menjadi AC dengan tegangan lebih rendah.
- Penyearah (dioda): Mengubah arus AC menjadi arus DC melalui proses penyearahan.
- Filter (kapasitor): Menghaluskan sinyal DC agar tidak berdenyut (ripple).
- Regulator tegangan (pada adaptor stabil): Menjaga agar tegangan output tetap stabil meskipun beban berubah.
Jenis Adaptor:
- Adaptor linier: Menggunakan transformator besar dan komponen analog, biasanya lebih berat.
- Adaptor switching (SMPS): Lebih kecil dan efisien karena bekerja pada frekuensi tinggi.
Adaptor digunakan untuk menyuplai daya ke berbagai perangkat seperti mikrokontroler (Arduino, ESP32), router, speaker aktif, dan peralatan elektronik lainnya yang memerlukan tegangan DC stabil. Beberapa adaptor juga dilengkapi jack DC, USB, atau terminal kabel sesuai jenis penggunaannya.
- Input AC: 85–265 V AC, 50/60 Hz
- Output DC: 5 V ±5 %, up to 2 A (~10 W)
- Efisiensi: ≥80 %
- Standby power: <75–100 mW (sesuai level energi)
- Frekuensi switching: ~65–130 kHz
- Proteksi: over‑current, over‑voltage, short circuit, thermal shutdown
Input adalah semua data dan perintah yang dimasukkan ke dalam memori untuk diproses lebih lanjut oleh mikroprosesor. Sebuah perangkat input adalah komponen piranti keras yang memungkinkan user atau pengguna memasukkan data ke dalam mikroprosesor. Output adalah data hasil yang telah diproses. Perangkat output adalah semua komponen piranti keras yang menyampaikan informasi kepada orang-orang yang menggunakannya.
Pada STM32 dan Raspberry Pi Pico pin input/output terdiri dari digital dan analog yang jumlah pin-nya tergantung jenis mikrokontroller yang digunakan. Input digital digunakan untuk mendeteksi perubahan logika biner pada pin tertentu. Adanya input digital memungkinkan mikrokontroler untuk dapat menerjemahkan 0V menjadi logika LOW dan 5V menjadi logika HIGH. Membaca sinyal digital pada mikrokontroller dapat menggunakan sintaks digitalRead(pin);
Output digital terdiri dari dua buah logika, yaitu kondisi logika HIGH dan kondisi logika LOW. Untuk menghasilkan output kita dapat menggunakan sintaks digitalWrite(pin,nilai); yang sebelumnya pin sudah diset ke mode OUTPUT, lalu parameter kedua adalah set nilai HIGH atau LOW. Apabila pin diset dengan nilai HIGH, maka voltase pin tersebut akan diset ke 5V atau 3.3V dan bila pin diset ke LOW, maka voltase pin tersebut akan diset ke 0V
4.2 PWM
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi.
Duty Cycle adalah perbandingan antara waktu ON (lebar pulsa High) dengan perioda. Duty Cycle biasanya dinyatakan dalam bentuk persen (%).

4.6 UART (Universal Asynchronous Receiver Transmitter)
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.








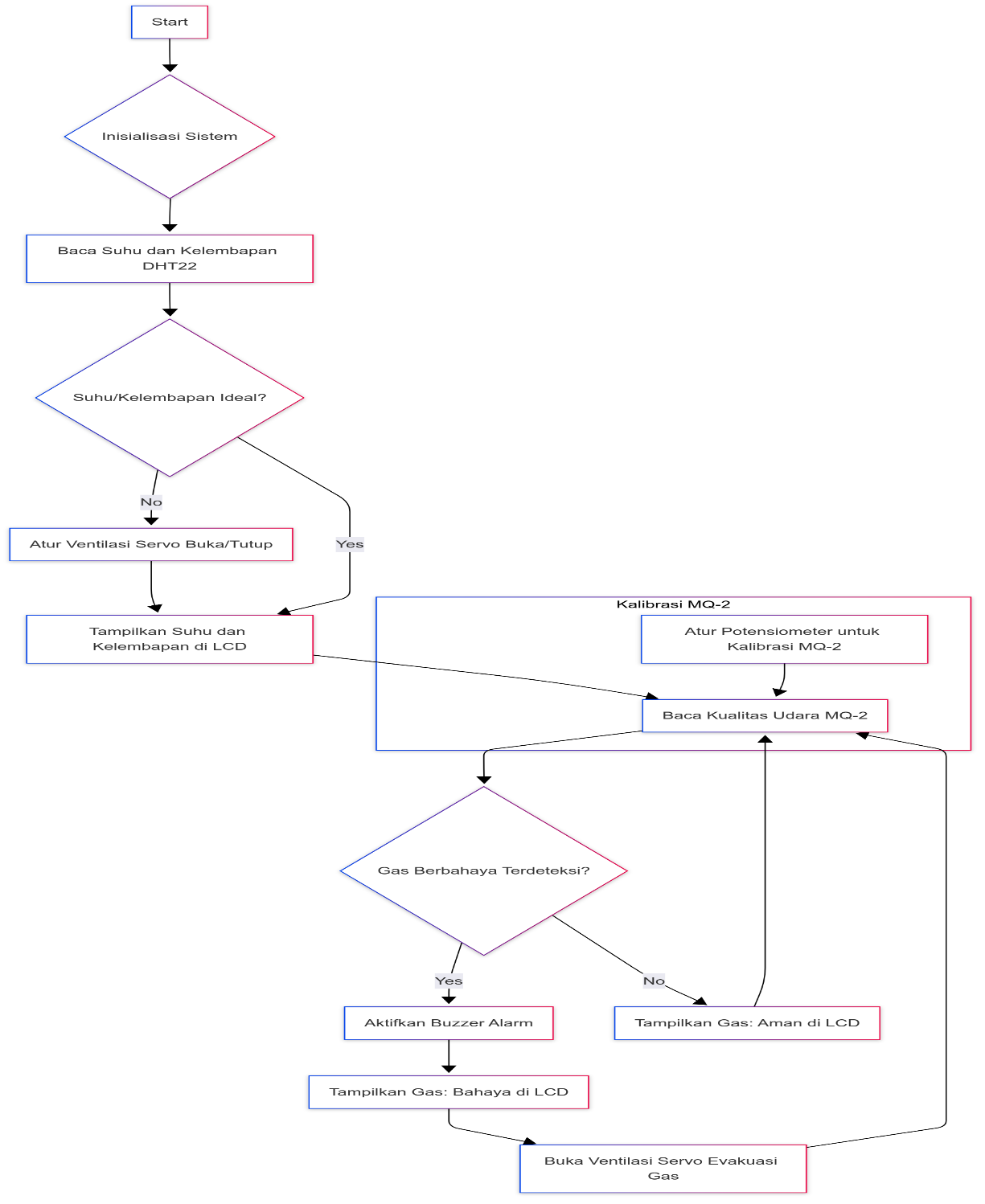
5. Flowchart dan Listing Program[Kembali]



LISTING PROGRAM - RASPBERRY PI PICO (Software: Thonny IDE)
from
machine import Pin, ADC, UART, PWM, I2C
from
ssd1306 import SSD1306_I2C
import
dht
import
time
#
--- OLED via I2C ---
i2c
= I2C(1, scl=Pin(15), sda=Pin(14), freq=400000)
oled
= SSD1306_I2C(128, 64, i2c)
#
--- Sensor ---
ldr
= ADC(Pin(26)) # LDR on
GP26 (ADC0)
dht_sensor
= dht.DHT11(Pin(27)) # DHT11 on GP27
led_pwm
= PWM(Pin(28)) # LED PWM on
GP28
led_pwm.freq(1000)
buzzer
= Pin(13, Pin.OUT) # Buzzer on
GP13
#
--- UART to STM32 ---
uart
= UART(0, baudrate=9600, tx=Pin(0), rx=Pin(1))
#
--- Thresholds ---
lux_threshold
= 200
uart_connected
= False
gas_ppm
= 15.0
temp
= 0
hum
= 0
lux
= 0
#
--- OLED Display helper ---
def
show_values_on_oled():
oled.fill(0)
oled.text("DATA INCUBATOR", 0, 0)
oled.text("Gas : {:.1f}
ppm".format(gas_ppm), 0, 16)
oled.text("Temp: {}
C".format(temp), 0, 32)
oled.text("Hum : {}
%".format(hum), 0, 40)
oled.text("Lux : {}".format(lux),
0, 56)
oled.show()
#
--- Read DHT11 ---
def
read_dht_sensor():
try:
dht_sensor.measure()
t = dht_sensor.temperature()
h = dht_sensor.humidity()
return t, h
except Exception as e:
print("DHT11 Error:", e)
return None, None
#
--- Read LDR ---
def
read_lux():
raw = ldr.read_u16()
return int((raw / 65535) * 1000)
#
--- LED brightness controller ---
def
control_led(lux_val):
if lux_val > lux_threshold:
duty = int((lux_threshold - lux_val) /
lux_threshold * 65535)
led_pwm.duty_u16(duty)
else:
led_pwm.duty_u16(0)
#
--- Startup Display ---
oled.fill(0)
oled.text("HELLO
GUYS", 0, 0)
oled.text("SMART
EGG", 0, 16)
oled.text("INCUBATOR",
0, 32)
oled.text("STARTING...",
0, 48)
oled.show()
time.sleep(3)
#
--- Check UART on startup ---
uart.write("PING\n")
t_start
= time.ticks_ms()
while
time.ticks_diff(time.ticks_ms(), t_start) < 2000:
if uart.any():
line = uart.readline()
if line and b"PONG" in line:
uart_connected = True
print("UART connected!")
break
if
not uart_connected:
print("UART not responding")
#
--- Main Loop ---
while
True:
# 1. LDR
lux = read_lux()
control_led(lux)
# 2. DHT
temp, hum = read_dht_sensor()
if temp is None or hum is None:
temp, hum = 0, 0
# 3. Kirim ke STM32
if uart_connected:
uart.write("TEMP_HUM:{},{}\n".format(temp, hum))
uart.write("LUX:{}\n".format(lux))
# 4. Baca dari STM32 (Gas PPM)
if uart.any():
try:
line = uart.readline()
if line:
decoded = line.decode().strip()
print("UART:",
decoded)
if
decoded.startswith("GAS_PPM:"):
gas_ppm =
float(decoded.split(":")[1])
if gas_ppm > 0:
buzzer.value(1)
time.sleep(1)
buzzer.value(0)
except Exception as e:
print("UART Read Error:",
e)
# 5. OLED Update
show_values_on_oled()
time.sleep(2)
- STM32F103C8T6 (Software: Arduino IDE)
6. Rangkaian Simulasi dan Prinsip Kerja[Kembali]


Pada rangkaian demo project bernama "Smart Egg incubator", dimana akan melakukan monitoring dan kontrol sistem dengan komunikasi UART dari 2 mikrokontroler Raspberry Pi Pico dan STM32F103C8.
- Komponen dan kondisi Node STM32F103C8T6 (Software: Arduino IDE)
1. Gas sensor Mq-2 : Memberi ambang batas nilai ppm di 120ppm, jika melebihi itu, buzzer pada raspberry akan aktif. Pada OLED di STM32 akan memberikan notifikasi "terdapat gas berbahaya". Sementara pada OLED di Raspberry akan memberikan data nilai PPM di baris ketiga-nya. Dan juga memberikan kontrol pada servo motor, dimana melakukan pergeseran lengan nya sebesar
Jadi pada node ini:
- Sensor dan Output pada Raspberry Pi pico (software: Thonny IDE)
1. LDR photoresistor sensor: Mengindikasikan bahwa tingkat kecerahan pada incubator terpenuhi (set default = 200lux). Jika tingkat kecerahan incubator kurang, maka memberikan data pada OLED di Raspberry memberikan data nilai LUX nya, lalu pada LED nya akan menambahkan kecerahannya seiring kebutuhan lux.
2. DHT11 Sensor: Mendeteksi tingkatan suhu incubator (32-39 derajat celcius). Lalu untuk kelembapan berada pada 0-20%, jika di luar itu maka akan tampilkan pada OLED STM32 berupa "Suhu terlalu rendah/suhu terlalu tinggi" lalu pada OLED raspberry akan menuunjukkan data berapa suhu dan kelembapan yang terukur. Dan ketika suhu terlalu rendah atau terlalu tinggi maka akan menggerakkan servo agar ventilasi terbuka dengan menggeser lengannya 90 derajat searah jarum jam (dari 0 derajat ke 270 derajat)
Jadi pada node ini terdiri dari:
Datasheet Raspberry Pi Pico RP2040 [Download]
Datasheet STM32F103C8T6 [Download]
Datasheet Sensor Gas MQ-2 [Download]
Datasheet LDR photoresistor [Download]
Datasheet LED [Download]
Datasheet Buzzer [Download]
Datasheet OLED 1306 [Download]
Datasheet Motor Servo SG90 [Download]
Datasheet Resistor [Download]
Datasheet Push Button [Download]
Datasheet Adaptor [Download]
Download Html [Download]
Download Video [Download]
Download Skematik [Download]
Download Program Raspberry Pi Pico [Download]
Download Program STM32F103C8 [Download]



